Binary Impact Search
To get a better scaling algorithm we can use binary search. It starts this way:
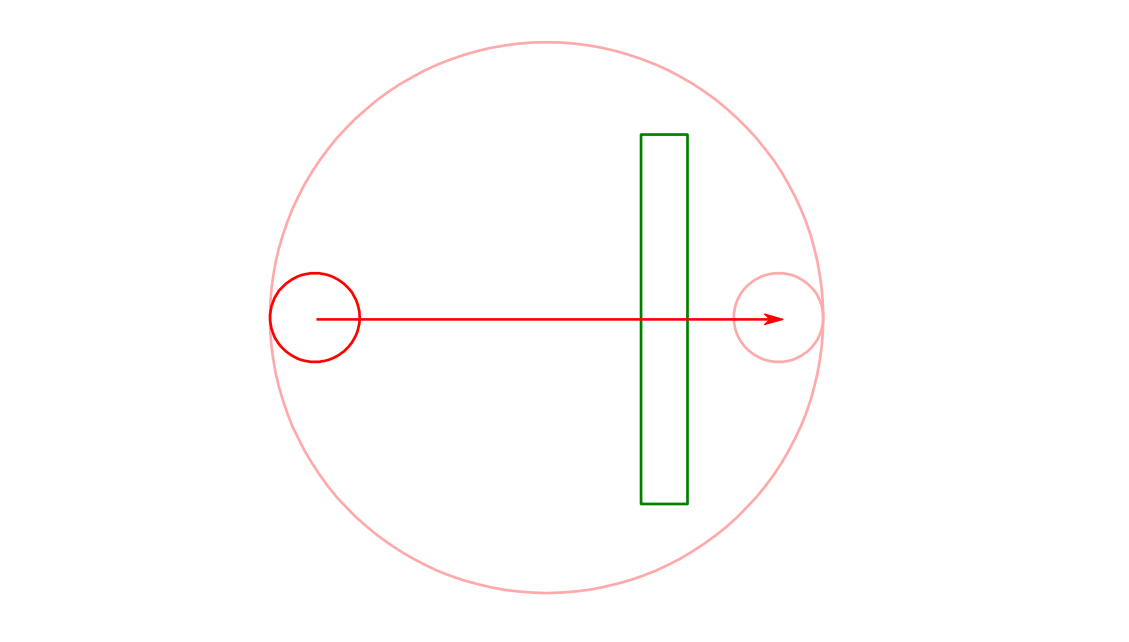
We enclose the moving object's current position and moved position in a bounding circle. If the obstacle does not collide with this bounding circle we know there can't be a collision. Otherwise we subdivide the problem into two halves:
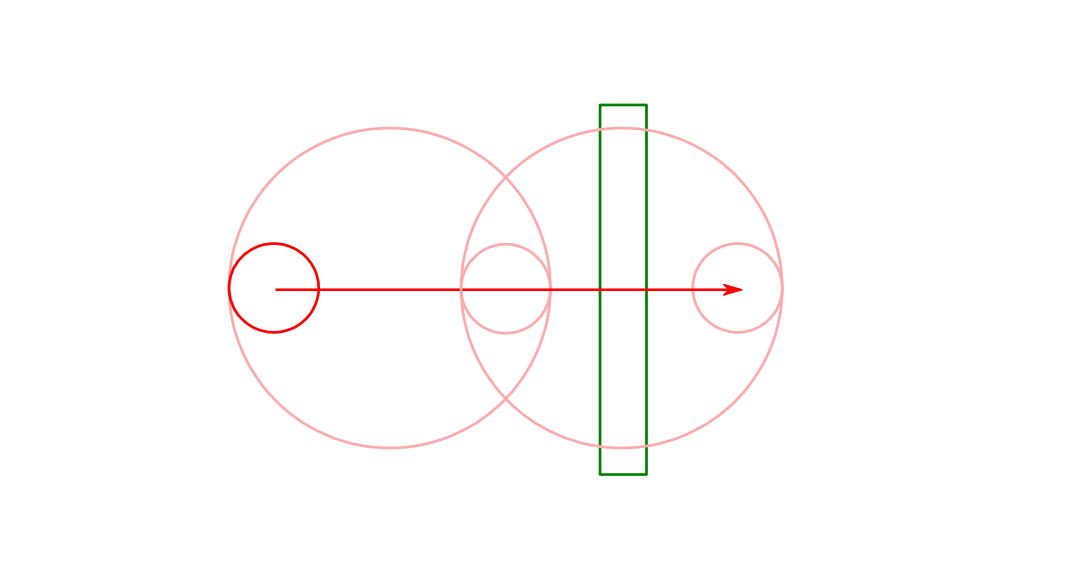
The first half represents the object covering the first half of the distance. As done before we encircle the start and end position with a bounding circle. If this bounding circle were to collide with the obstacle we would continue subdividing this movement segment. But it doesn't, so we test the second bounding circle, wrapping the halfway-through object and its destination position. This bounding circle collides with the obstacle so we subdivide the second half as done before:
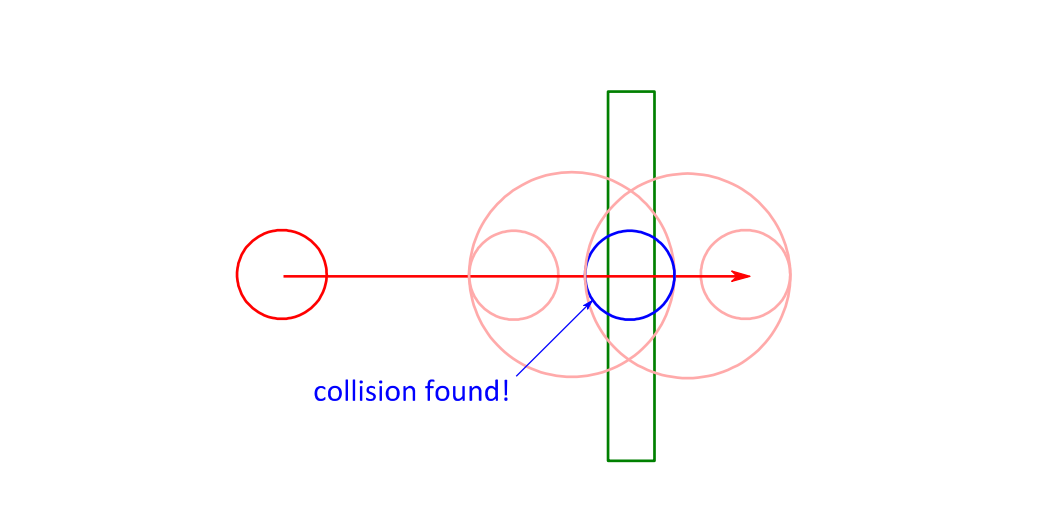
This goes on until the subdivided distance gets close to zero. How close to zero is a matter of required accuracy. The moving shape's size gives a good factor for the minimum distance. This method is generic and works with all kinds of shapes. Tweaking the minimum distance gives us control over the trade-off between speed and accuracy. Longer distances result in faster collision detection, smaller distances yield more accurate results.